While working on SinCos encoders i made a quick test setup from an AS5115 encoder chip and a 2204 drone motor.
Once that worked well i got the idea to use it as a steering wheel and it actually is pretty high fidelity. About 1:8 to 1:10 scale and reacts insanely fast and precise. You feel the curbs and any movement. But if the torque gets cranked up too high the motor will definetly get very hot without cooling.
After the old powerstep based motor controller i improved the idea of an open source force feedback interface for direct drive wheels and other simulation interfaces with high torque demand in a modular way
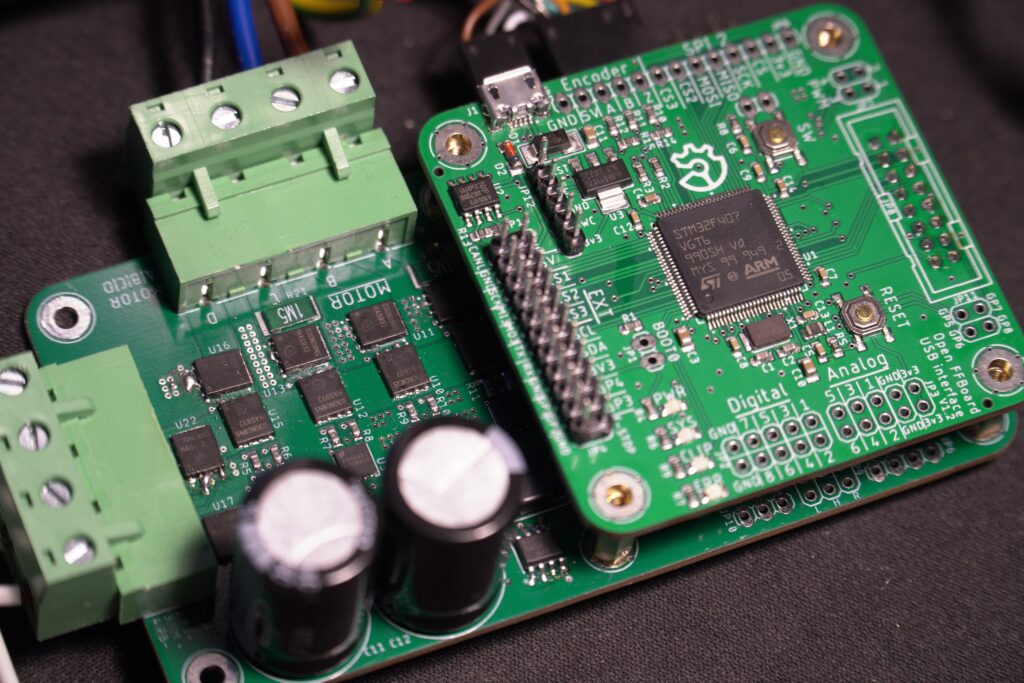
OpenFFBoard consists of a simple STM32F407VG based usb interface with defined pins for SPI, buttons, leds, encoder input, CAN bus and more.
Take a look at the full development story on hackaday.io
Firmware and hardware design ressources are available on Github
A TMC4671 based motor driver which is also developed in this project as a reference can drive 2 phase steppers, 3 phase servos and DC motors at up to 60V DC and over 20A. It has an active anti backfeed diode circuit for use with power supplies and a brake resistor mosfet included. It also features highly accurate current sense amplifiers and voltage sense dividers. An onboard 5V DC converter can supply the hardware directly from the motor power supply.
The TMC4617 can also use external BISS-C and Magntek encoders by forwarding positions via SPI from the FFBoard since firmware 1.8. This causes a lot of additional load on the microcontroller so it is not ideal but it seems to work pretty well and reliably.
Additionally the ODrive and VESC via CAN and a PWM output with PPM, 0-50%-100% centered, pwm+dir and dual pwm (different pins per quadrant) are supported.