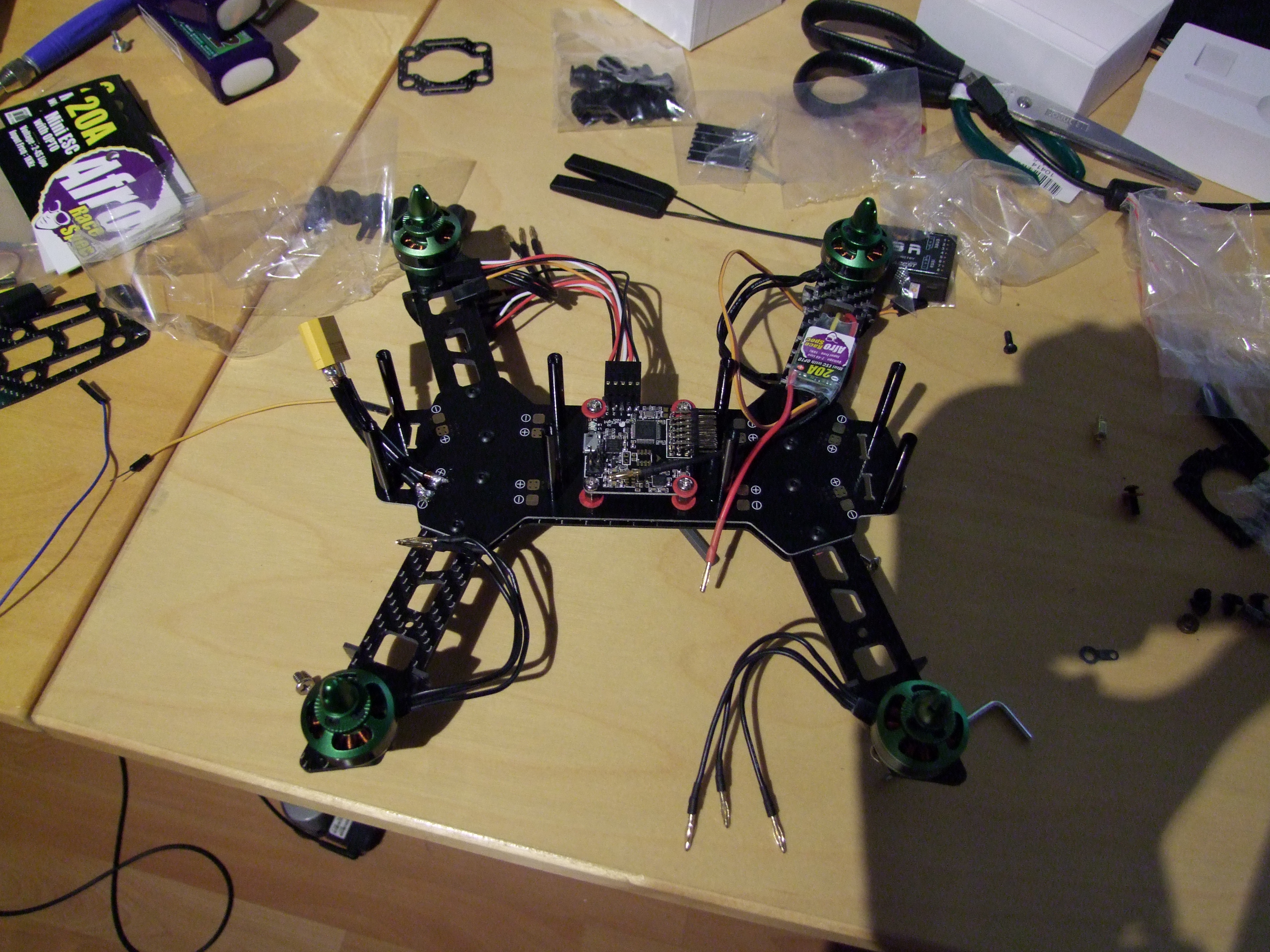
This is my first real quadcopter build.
It is based on the Diatone 250 frame, some Multistar elite 2204 2300kv motors and the naze32 flight controller.

The Naze32 rev5 does not work with sbus without an additional inverter so i first tried to just use pwm.
Even without flying i noticed an annoying delay in the throttle response so i tried to use sbus anyways and bypassed the inverter in my x8r.
 I will still have to change the flight controller later as i want to use s.port telemetry, which won’t work with the naze32 rev5.
I will still have to change the flight controller later as i want to use s.port telemetry, which won’t work with the naze32 rev5.
To save a bit weight it should also be a good idea to clean the wiring and switch to the smaller frsky x4r receiver.
Pretty much finished now: Even with stock pids it hovers fine:
Even with stock pids it hovers fine: